

")
Forschungsgruppe Verlässliche Robotik
(Dependable Robotics, DeBot)
Ziel der Forschungsgruppe „Verlässliche Robotik“ ist die Entwicklung einer Methodologie zur Modellierung, zum Entwurf und zur Realisierung verlässlicher Systeme im Bereich der Robotik. Basierend auf neuartigen Konzepten zur Systembeschreibung werden modellbasierte Entwurfsverfahren und darauf aufbauend Techniken für die Erfassung der Verlässlichkeit sowie Regelungskonzepte zur Sicherstellung und Steigerung der Verlässlichkeit umgesetzt. Das Gesamtkonzept und einzelne Methoden sollen im Rahmen von nationalen und internationalen Forschungsprojekten, (siehe ECOMODIS, ITD, CYCLOBOT und IntelliCIS) ausgebaut und durch die Realisierung von Applikationen aus den Bereichen „Autonome Mobile Robotik“, „Assistenzsysteme“ sowie „Medizin- und Rehabilitationsrobotik“ demonstriert werden.
Aktuelle Projekte
ECOMODIS
Das Verbundprojekt ECOMODIS hat die Realisierung einer nahtlosen, komponentenbasierten Technologie zum Entwurf verlässlicher Computersysteme zum Ziel, die sämtliche Entwurfsebenen von Hardware über Software bis hin zu menschlichen Faktoren umfasst. Der komponentenbasierte Ansatz soll dazu beitragen, komplexe Computersysteme in Zukunft beherrschbarer zu machen, indem die Verlässlichkeit solcher Systeme erhöht wird.
Der ECOMODIS-Entwurfsprozess stützt sich in weiten Teilen auf eine verhaltensbasierte Systembeschreibung, ein hierarchisches Komponentenmodell und eine generische Systemarchitektur. Ein wesentlicher Bestandteil im ECOMODIS-Projekt ist die Entwicklung eines neuartigen Ansatzes zur Modellierung der Verlässlichkeit basierend auf einer fundamentalen Systembeschreibung. Im Gegensatz zur bekannten binären Fehlerbeschreibung für zuverlässige Systeme, spielt hierbei die Modellierung und Beobachtung des Verhaltens von Komponenten und des Gesamtsystems im Vergleich zum gewünschten Systemverhalten eine wesentliche Rolle.
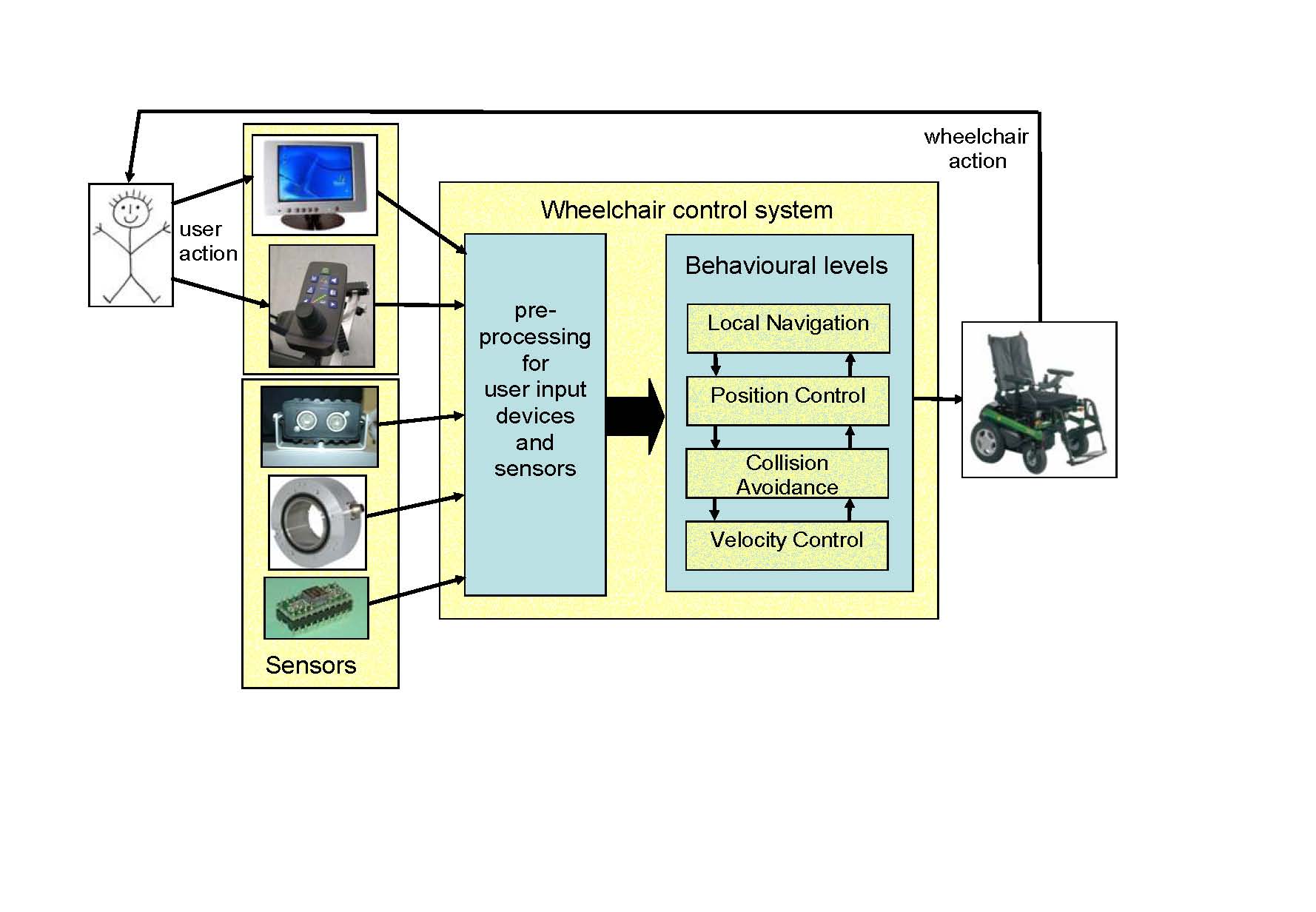
Die verhaltensbasierte Systembeschreibung wird in Bezug auf Hardware, Software und Mensch-Technik-Interaktion verfeinert und in Modellierungs- und Realisierungstechniken umgesetzt. Als Demonstrationsplattformen für sicherheitskritische Systeme dienen die beiden Anwendungen „Intelligenter Rollstuhl“ (siehe Bild) und „Intensivstation“.
 |
|
Systemstruktur "Intelligenter Rollstuhl" bestehend aus Sensoren, Steuerung und antrieb sowie verschiedenen Ein- und ausgabengeräten zur Nutzerinteraktion. |
Das ECOMODIS -Projekt ist eine Kooperation zwischen dem Lehrstuhl für Automation, dem Lehrstuhl für Informatik V und dem Interdisziplinäres Institut für Computerunterstützte Medizin/Experimentelle Strahlentherapie (Univ. Heidelberg) sowie dem Lehrstuhl für Softwaretechnik und dem Otto-Selz-Institut für Angewandte Psychologie (Univ. Mannheim). Das Projekt wird im Rahmen des BW-FIT-Programms vom Ministerium für Wissenschaft, Forschung und Kunst, Baden-Württemberg gefördert.
ITD
Ziel des Projekts „Intelligent Tool Drive“ (ITD) ist die Entwicklung eines freihandgehaltenen Operationsroboters mit sechs Freiheitsgraden zur Bearbeitung von Knochen während eines orthopädischen Eingriffs.
ITD soll die Vorteile der Robotik (hohe Präzision) mit denen der medizinischen Navigation (vereinfachte Orientierung im Patienten) und der Erfahrung des Chirurgen kombinieren. Zusätzlich sollen Störbewegungen durch den Tremor der Chirurgenhand, kompensiert und die Instrumentenspitze ruhig geführt werden. Eine mögliche Anwendung ist zunächst die Wirbelsäulenversteifung, für die Schraubenlöcher in die Wirbelkörper vorgebohrt werden. In einer späteren Projektphase sollen weitere chirurgische und technische Anwendungsfelder bedient werden.
Ein Funktionsprototyp basierend auf einer Parallel-Roboter-Struktur (Hexaglide) wurde bereits realisiert und im Labor getestet (siehe Bild).
 |
|
Integriertes ITD_V.0.2-System bestehend aus den Komponenten Robotermechanik (roter Pfeil), Tracking (gelber Pfeil) und Steuerung (Konsole des Steuerungssystems links im Bild). |
CYCLOBOT
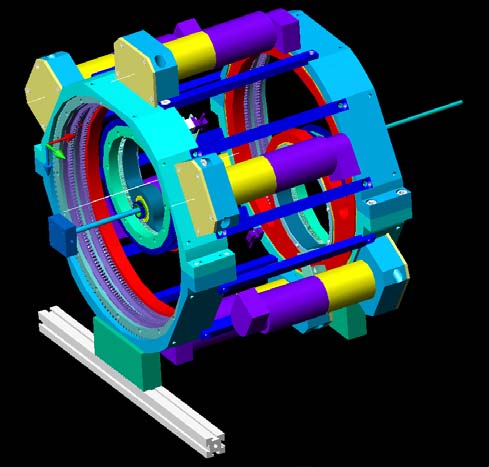
Im Rahmen des CYCLOBOT-Projekts werden neuartige auf epizyklischen Getrieben basierende Roboterstrukturen mit bis zu 6 Freiheitsgraden realisiert.Die sogenannte Epizaktor-Kinematik kann wegen ihres Aufbaus und wegen des günstigen Arbeitsraum-zu-Bauraum-Verhältnisses sehr klein ausgelegt werden. Aufgrund der spezifischen Bauweise sind jedoch das Zahnradspiel, Reibung und Elastizitäten kritische Designparameter, die auch in der dynamischen Regelung eines Epizaktors berücksichtig werden müssen. Ein besonderes Interesse gilt der Genauigkeit der Positionsregelung, der Vermeidung von singulären Stellungen in der Roboter-Kinematik und der Einhaltung von Grenzwerten während der Positionsregelung eines Bearbeitungswerkzeugs.
 |
|
CAD-Modell des CYCLOBOT (siehe MERODA Datenbank) |
In dem von der Deutschen Forschungsgemeinschaft geförderten Projekt kooperieren: Lehrstuhl für Automation (Univ. Heidelberg), Labor für Biomechanik und Experimentelle Orthopädie (Univ. Heidelberg), Institut für CAE (Hochschule Mannheim), Production Engineering Institute (Cracow University of Technology).
IntelliCIS
Ziel von IntelliCIS ist die Entwicklung von intelligenten Überwachungs-, Steuerungs- und Sicherheitstechnologien für kritische Infrastrukturen, wie beispielsweise Energieversorgungssysteme, Telekommunikationsnetze und Wasserversorgungssysteme. IntelliCIS ist eine COST-Aktion der Europäischen Kommission, die eine Vernetzung von koordinierten nationalen und internationalen Forschungsprojekten fördert. An IntelliCIS nehmen über 40 Partnerinstitute aus ca. 20 Europäischen Ländern teil.
Mitglieder
- Dr.-Ing. Achim Wagner (Sprecher)