

")
Research Areas
On this page we briefly introduce the research groups at the Institute for Computer Engineering of the University of Heidelberg and their research areas:
APPLICATION SPECIFIC COMPUTING
Our research focuses on significant improvements of performance and accuracy in application specific computing through a global optimization across the entire spectrum of numerical methods, algorithm design, software implementation and hardware acceleration.
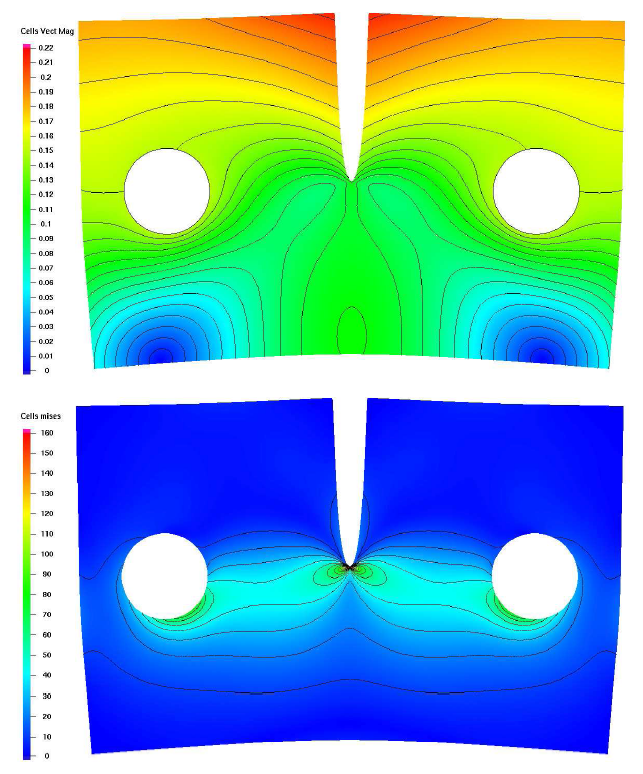
These layers typically have contradictory requirements and their integration poses many challenges. For example, numerically superior methods expose little parallelism, bandwidth efficient algorithms convolve the processing of space and time into unmanageable software patterns, high level language abstractions create data layout and composition barriers, and high performance on today's hardware poses strict requirements on parallel execution and data access. High performance and accuracy for the entire application can only be achieved by balancing these requirements across all layers.
The following topics are given particular attention:
- Data representation (mixed-precision, compression, redundancy)
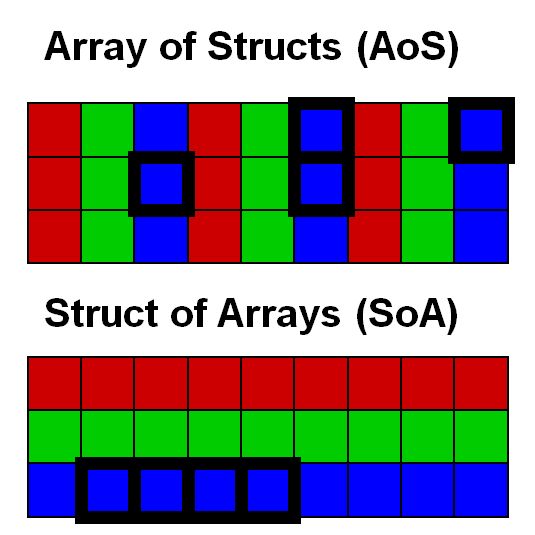
- Data access (layout, spatial and temporal locality)
- Data structure (unstructured grids, graphs, adaptivity)
- Numerical methods (ILU, Krylov, GMG, AMG)
- Programming abstractions (CUDA, thrust, PSTL, C++2x, UPC++)
COMPUTING SYSTEMS
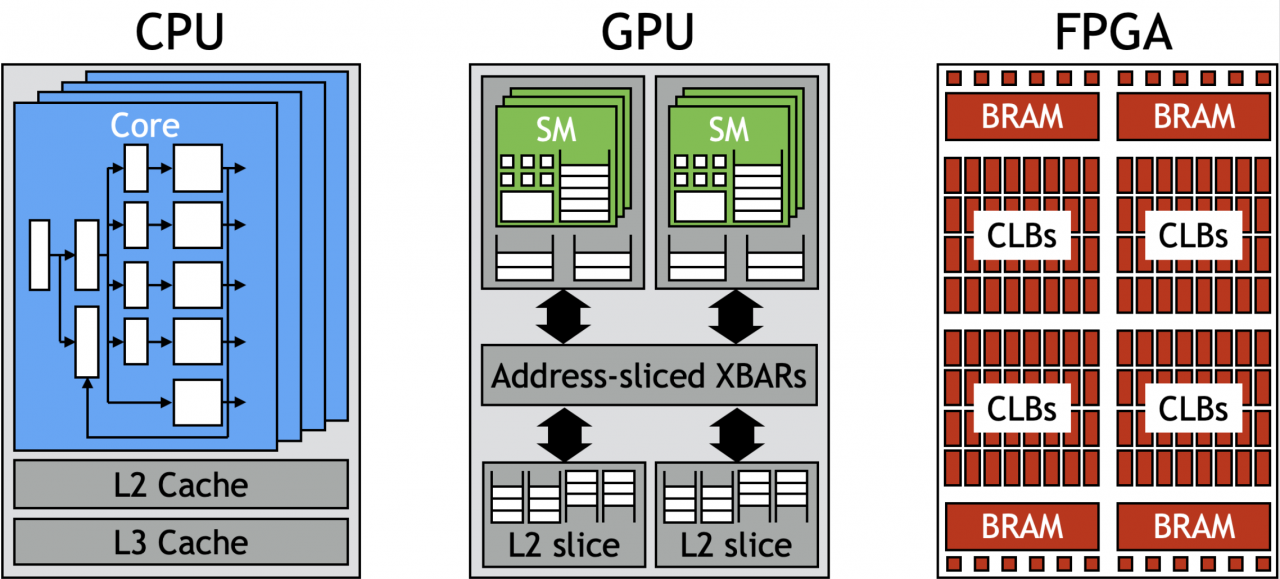 |
Today, research in computing systems is most concerned with specialized forms of computing in combination with seamless integration into existing systems. Specialized computing, for instance based on GPUs (as known for gaming) or FPGAs (field programmable gate arrays) or ASICs (not the shoe brand but “application-specific integrated circuits”), is motivated by diminishing returns from CMOS technology scaling and hard power constraints. Notably, for a given fixed power budget p, energy efficiency e defines performance per f: perf[ops/sec] = p[Watt] * e[ops/Joule]. Thus, a sustained performance scaling based on CMOS technology requires to improve the energy efficiency of compute and memory operations substantially, which is typically being done using the previously mentioned specialized forms of computing. However, any specialization stands in contrast to generality, thus raising various questions related to programmability and algorithmic innovation. |
Particular research foci include
- resource-efficient ML such as model compression for edge, mobile and embedded systems
- code analysis and generation as for instance based on CLANG/LLVM and targeting (multi-)GPU systems
- HW/SW codesign to meet application objectives by a comprehensive treatment of software and hardware components
- specialized processor architectures under performance, energy efficiency and programmability constraints
The group is most concerned with bridging the gap in between application and hardware, including automated tools as well as abstract models that facilitate reasoning about various optimizations and decisions.
CIRCUIT DESIGN
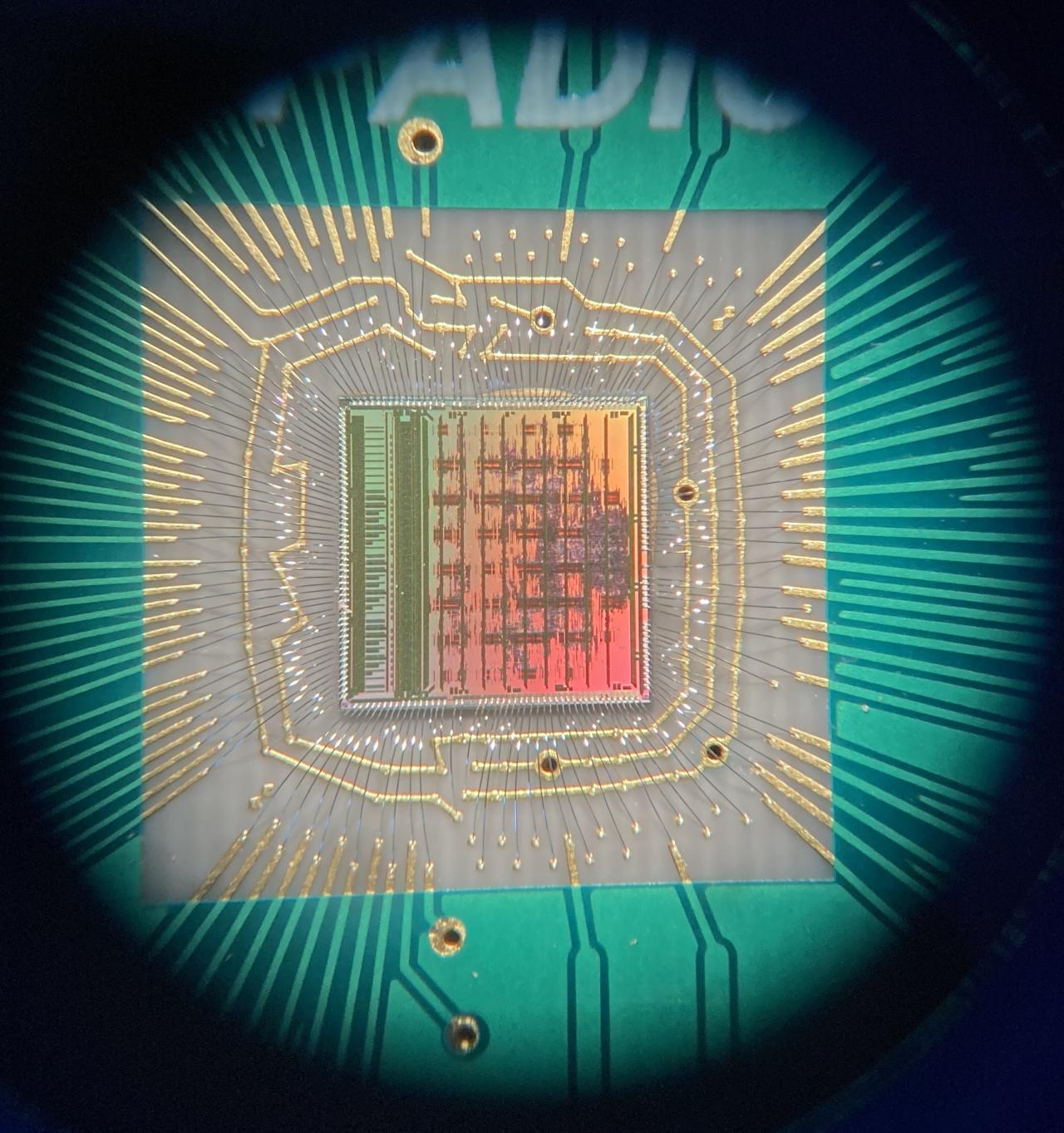 |
At the chair of Circuit Design, microelectronic circuits are developed, tested and applied. These microchips often contain extremely sensitive, low noise amplifiers for capturing sensor data and blocks for further analog and digital signal processing. Some chips contain particle- or (single) photon-sensitive structures. The crucial analogue parts of such chips are designed completely manually. Complex digital blocks described by HDL languages are converted to a layout by a suitable tool chain and both parts are merged. The chips are fabricated in state-of-the-art CMOS technologies and commissioned by suited additional hardware (often FPGA boards) in the group.
Examples projects are readout and processing chips for particle detectors (e.g. see picture), single photon sensors for dark matter search or microscopy, hybrid pixel detectors for synchrotron X-ray detection at Eu-XFEL or ESRF or chips for state-of-the-art PET scanners.
BIOROBOTICS AND BIOMECHANICS
What is Biorobotics? And what is the research of the ARIES Lab?
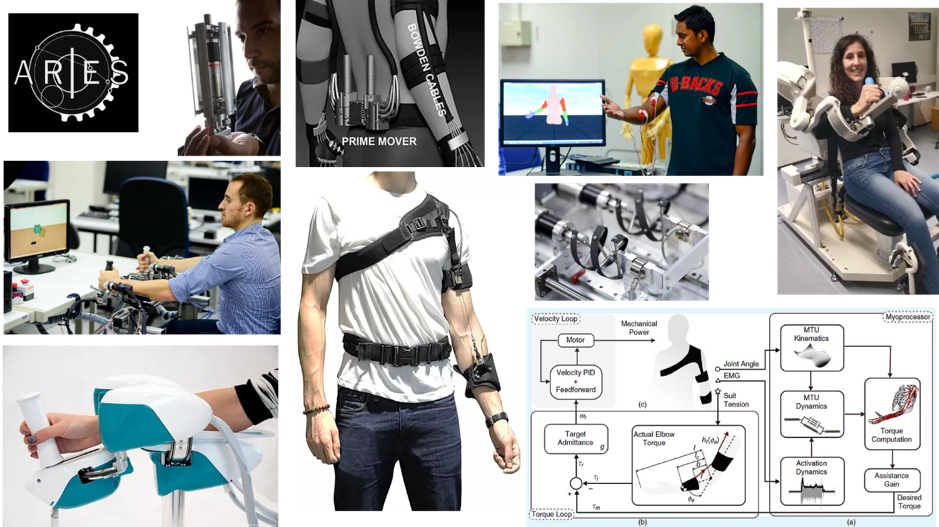 |
The ARIES lab of the group of Prof Dr Lorenzo Masia focuses its research on three different pillars:
- Rehabilitation engineering
- Soft wearable robotics
- Intelligent actuators and controllers
The main scope of the lab is conceiving, design and develop wearable technology which is able to support human beings in multiple scenarios, ranging from rehabilitation and personalized assistance to empowering workers in working environments, enhancing safety and productivity.
Our team comprises a wide range of expertise, which contemplates mechanical design, embedded control implementation, computational biomechanics, machine learning and clinical data analysis. We design our own technology and we test it on the final users; that´s why we have collaboration with both clinical and industrial partners.
The main purpose is being able to respond to the main calls of the new trends in human-machine interaction and wearable technology. Prof Masia´s group has a multi-faceted experience in haptics and rehabilitation robotics, developing all the projects in house in a fully equipped 200 square meters laboratory with the state-of-the-art instruments for motion capture, metabolic analysis and mechatronics rapid prototyping.
Over the last few years we have gained high visibility in the field of soft wearbale exosuits design and assistive technology: we have developed a variety of functional, upper-limb devices for the support of the hand, elbow and shoulder joint. In each of these endeavours, we have presented innovative control implementations and complex actuation strategies purposefully designed for wearable technologies. All the systems represent novel hardware implementations of multi-joint soft exosuits for the upper limb but we are now expanding our research areas in lower limb assistance with specific focus on augmenting human walking capacity. We have also gained experience in complementing industrial exoskeletons with embedded actuation and soft layers to mobilize more joints, and provide wearers with a better endurance and physical performance.
What is Biomechanics about? The Heidelberg Center for Motion Research
 |
Whether studying the skilled movements of a gymnast, analyzing abnormal muscle activity in patients with locomotion disorders, or estimating the top running speed of a Tyrannosaurus Rex, biomechanics focuses on understanding movement using mechanics and physiology. This broad area of research has been active from the time of Socrates to today. Since nature is complex, many research questions have remained open since the time of Socrates: how does muscle work? what factors shape movement? Other topics are distinctly new: how can we train fall-prone older adults to improve their balance?; how can we draw inspiration from biology to optimal design controllers for an exoskeleton to augment movement?
At Heidelberg University, we focus primarily on the topics of dynamic balance and simulation. Injury due to falls disproportionately affects older adults, amputees, and people with movement pathology. To reduce the injury due to falls, we focus on developing methods to identify people at risk of falling, assessing the effectiveness of assistive devices to restore balance, and evaluating training regimes to improve their balance. As part of our work to develop new measures to quantify balance, we also search for new ways to measure movement that are translatable to everyday use in the clinic or people's lives. Our second area of research focuses on modelling and predicting human movement using the mathematics of optimal control and multibody dynamics. We apply these methods to aid in the design of assistive devices and to study movement science. Together with the medical expertise and experimental and computer facilities at Heidelberg University, we have contributed to the design of low-back exoskeletons, ankle-foot orthoses, the analysis of balance, and the development of new wearable assistive devices.