Human Robot Interaction (2022-2024)
The research group „Neuromechanics and Human Robot Interaction“ investigates the generation and control of active human movements. We develop computer models and simulations of the neuro-musculoskeletal system. In a multi-level approach, we consider the different hierarchical levels contributing to movement generation. This interdisciplinary approach is mainly based on biophysics, biomechanics, and computational motor control.

Our goal is to understand how the different hierarchical levels of the neuronal network interact with the musculoskeletal system to form a learning and adapting closed‐loop system capable of generating robust movement. We are particularly interested in complex‐non‐steady state movements related to activities of daily living. In this very dynamic and interdisciplinary research area, we are particularly interested in how muscle dynamics influence and simplify human motor control and motor learning. For this, our unique research expertise is the development of information entropy‐based criteria to quantify what is commonly referred to as Physical Intelligence or Morphological Computation. Both represent the notion that the neuronal system interacts with the environment through its body, which, in consequence, shapes human behavior. We quantify this contribution of the body with the help of mathematical models and computer simulations of the sensorimotor system. Here, we are particularly interested in detailed neuro‐musculoskeletal models which allow us to quantify information processing requirements for motor control tasks.
Research Projects
Modelling motor control in rare neurodegenerative diseases
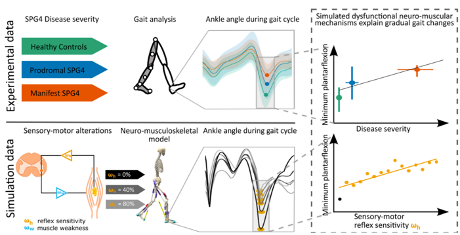
Motor control abnormalities are key symptoms in several rare neurodegenerative diseases. We contribute to a project in which our colleagues study the development and progression of movement dysfunctions by assessing kinematics of premanifest and manifest patients. Our role in this project is to develop neuro-mechanical models with the aim to develop a more detailed understanding of the progressive character of motor control dysfunction. Especially, we are interested in the relationship between altered neuromuscular reflexes and kinematics.
Contributors: Christian Laßmann, in Collaboration with Winfried Ilg and Ludger Schoels, HIH Tübingen
Novel controller concept for Robotic Mirror Therapy
Mirror therapy has been proven to be an effective rehabilitation method in hemiparetic stroke patients. Proprioceptive feedback, which is considered important for effective rehabilitation and increased neuroplasticity, could further improve the positive rehabilitation effects of mirror therapy. Here, we propose and test a control algorithm for a bi-manual rehabilitation exoskeleton (ALEx-RS, Wearable robotics) that moves the hemiparetic arm of the patient. Specifically, the movement of the affected arm is coupled to the healthy arm via robotic assistance in the context of functional tasks in virtual reality, thereby providing task-relevant proprioceptive feedback. We tested the algorithm on ten healthy subjects in two virtual scenarios. An analysis of the exoskeleton forces and kinematics shows that MirA can provide haptic feedback to the guided arm, while simultaneously assisting the movement. The participants showed a learning effect in the functional tasks over four sessions. These results suggest, that MirA could be used for motor rehabilitation for hemiparetic stroke patients.
In collaboration with Prof. Lorenzo Masia (ZITI, Heidelberg) and Prof. Ulf Ziemann (Hertie-Institute for Clinical Brain Research, Tübingen).
Selected Publications: Rominger, J., de Mongeot, L. B., Boehm, J., Lieb, A., Baur, D., Ziemann, U., Masia, L., & Haeufle, D. F. B. (2024). Supporting functional tasks in bi-manual robotic mirror therapy by coupling upper limb movements based on virtual reality. Proceedings of IEEE Ternational Conference on Biomedical Robotics and Biomechatronics (BioRob) (Accepted).
Leveraging morphological computation in autonomous control

Muscle-driven biological systems effortlessly outperform even the most sophisticated robots in terms of adaptivity, longevity and complexity of behaviour. However, widespread adoption of biomimetic devices is partially hindered by the difficulty of precisely controlling muscular morphologies, for which classical control approaches tend to fail. We therefore aim to control these systems with novel reinforcement learning techniques, leveraging their ability to deal with complex nonlinear actuators. The combination of autonomously learning agents with biomechanically inspired morphologies may unlock some of the secrets encoded by millions of years of evolution, while dealing with the unique control difficulties that these morphologies exhibit.
Contributors: Pierre Schumacher, in Collaboration with Georg Martius at MPI-IS and Dieter Büchler at MPI-IS and Syn Schmitt at Uni Stuttgart
Selected publications: Haeufle, D. F. B., Wochner, I., Holzmüller, D., Driess, D., Günther, M., & Schmitt, S. (2020). Muscles Reduce Neuronal Information Load: Quantification of Control Effort in Biological vs. Robotic Pointing and Walking. Frontiers in Robotics and AI, 7, Research topic: Recent Trends in Morphological Com. doi.org/10.3389/frobt.2020.00077
Model-based concepts for the control of assistive devices

We develop neuro-musculo-skeletal computer simulations of impaired motor control. These models can be used to estimate desing criteria for assistive devices. Furthermore, such models could be used to evaluate control strategies for assistive devices already in the design phase.
In collaboration with Syn Schmitt at Uni Stuttgart and Christoph Keplinger at MPI-IS.
Selected publications: Stollenmaier, K., Rist, I. S., Izzi, F., & Haeufle, D. F. B. (2020). Simulating the response of a neuro-musculoskeletal model to assistive forces: implications for the design of wearables compensating for motor control deficits. 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), 779–784. doi.org/10.1109/BioRob49111.2020.9224411
The contribution of muscles to the control of movement: quantifying morphological computation
Muscle fibres possess complex, nonlinear viscous properties, which allow to counter unexpected perturbations with zero time delay. This feature is critical during agile, legged locomotion, e.g., hopping and running, where sensory blindness due to neurotransmission delays can result in dangerous falls. By expanding the current understanding of the stabilising capacity of fibre viscosity, we aim to unveil new design principles for technical solutions in the field of legged robotics and medical rehabilitation/assistance.
Contributors: Fabio Izzi and Matthew Araz, In collaboration with MPI-IS (Link: dlg.is.mpg.de) and Uni Stuttgart (Link: www.inspo.uni-stuttgart.de/institut/av/)
Mo, A., Izzi, F., Haeufle, D. F. B., & Badri-Spröwitz, A. (2020). Effective Viscous Damping Enables Morphological Computation in Legged Locomotion. Frontiers in Robotics and AI - Soft Robotics, 7(August), 1–15. doi.org/10.3389/frobt.2020.00110